




在很多应用场合下既需要摆动又需要跟踪,为了更好的解决这个问题,也为了更大程度的提高焊接质量及焊缝精度,同时最大程度为客户节约设备成本,南京远新自动化科技有限公司有机的将焊接摆动器和焊缝跟踪器两者的功能柔合到一起,开发研制了YXAWOT摆动+跟踪一体机。此系统由高精度传感器探测焊接工件的坡口形状变化信号传给控制器,然后由控制器驱动上下和左右滑板来快速、的控制焊枪始终沿着焊缝中心左右摆动,从而实现焊接在摆动的同时又进行自动跟踪。有效解决摆动和跟踪两个问题,大大减少焊工的劳动强度和人为因素的影响,保证焊接质量和提高焊接效率,同时缩小自动焊设备空间和降低用户购买自动焊设备成本。

标准配置

操作界面
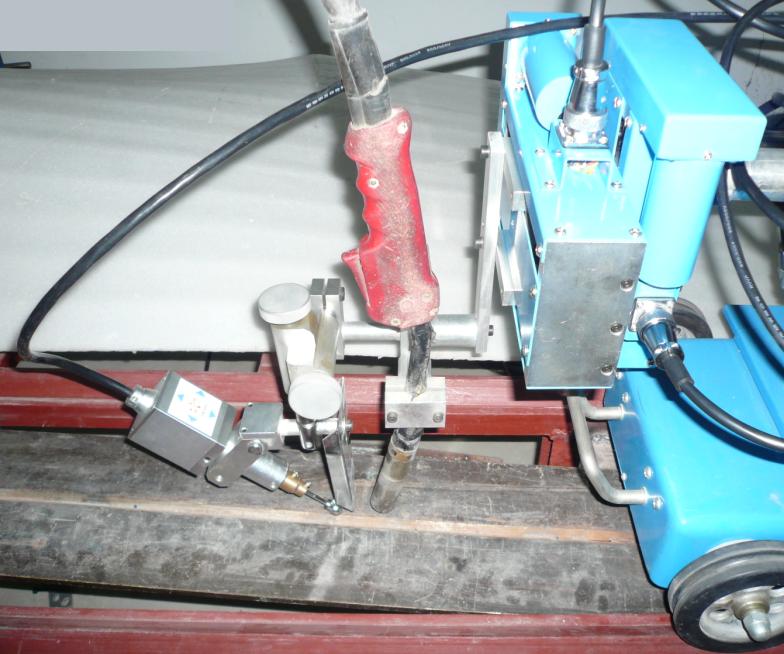
安装方法
◆ 主要功能特点和技术参数
|
型号
技术参数
|
YXAWOT-100CE-II
|
|
|
传感器形式
|
接触式
|
|
|
产品特点
|
● 宽输入电源电压范围,适合使用;
● 经济,适合需要摆动且需要上下和左右跟踪的应用场合。
|
|
|
最大承载
|
25Kg
|
|
|
滑板有效行程
|
上下100mm,左右100mm
|
|
|
最大摆动速度
|
4000mm/min
|
|
|
最大摆动频率
|
120times/min
|
|
|
摆动幅度
|
2-25mm
|
|
|
对中范围
|
10-90mm
|
|
|
摆动精度
|
±0.5mm
|
|
|
左/右停顿时间
|
0-3s
|
|
|
最高跟踪速度
|
上下450mm/min,左右取决于摆动速度
|
|
| 适合的焊缝形式 | 坡口焊缝和角焊缝 | |
|
适用焊接方法
|
CO2气保焊
|
|
|
控制方式
|
速度和位置双闭环直流伺服控制技术
|
|
|
驱动机构
|
电机+圆形直线导轨+滚珠丝杆
|
|
|
控制器
|
程序控制
|
|
|
控制
功能
|
手动
控制
|
上、下、左、右移动,摆动速度、摆动幅度、左右停顿时间设定调节,摆动启动/停止控制,跟踪启动/停止控制,停止时自动返回摆动中心位置。
|
|
自动
控制
|
上、下、左、右跟踪,左右摆动。
|
|
|
输入电源
|
单相AC100-240V,50/60Hz,2A
|
|
|
标准配置
|
控制器,上下、左右调节滑板,传感器,传感器调节机构,连接电缆(包括电源电缆、传感器电缆、左右滑板电缆、上下滑板电缆)
|
|
|
用户可选项
|
远控接口,通信功能
|
|
备注:另外我公司还可按照用户的需求为用户定作特殊规格的摆动+跟踪一体机。